Balita
Komento: Sukatin ang distansya sa sensor ng distansya ng VL53L1X ng ST

Ang paglikha ng mga larawan na "kulay" ay hindi bago. Ang sensor ng Microsoft's Kinect ay nagpasimula ng mga developer na nakakakuha ng spatial na impormasyon: isang trick kung saan ang STMicroelectronics ay ginagawang mas madaling mapamahalaan sa pamamagitan ng mga monolith ng sensor ng laser-based na distansya nito, na perpektong angkop sa mga drone landing sensor, sensitibo sa distansya at iba pang mga trinket.
Lahat sa isa…
Hindi tulad ng sensor na ginamit sa Kinect, ang ST sensor ay "one-dimensional". Ang optical window sa itaas ng chip ay kumikilos bilang viewfinder at emitter, habang ang distansya sa "mga bagay" sa harap ng detector ay ibinalik bilang isang one-dimensional na halaga (sa tingin: isang bagay ay 50cm ang layo mula sa akin).
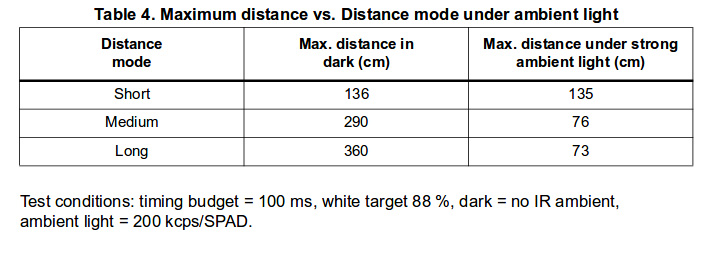
Higit pa rito, ang paggamit ng teknolohiya ng laser ay gumagawa ng halos ganap na independiyenteng sistema ng target na materyal - ang mga problemang may kaugnayan sa kulay na kilala mula sa mga klasikong mga bahagi ng IR ay hindi dapat mangyari dito.
Ang pagkakakonekta ng Host-Sensor ay nagagawa sa pamamagitan ng bus ng I2C: sadly, ang ST ay hindi maglantad ng tagapili ng address, sa gayo'y nililimitahan ka sa isang sensor sa bawat bus controller. Ang aktwal na komunikasyon protocol ay inilarawan sa isang hiwalay na dokumento: tulad ng ST nagnanais na baguhin ang mga scheme ng URL, lamang google para sa UM2356 upang mahanap ito - (ngunit "habang hindi naglalantad ng anumang mga tagapili ng address sa hardware, posible na piliin ang address sa pamamagitan ng mga command sa panahon ng startup ng sensor", ayon sa isang komento na na-post sa ibaba ni Martin Palsson, na kasama ang higit pang mga detalye (mag-scroll pababa)).
Bukod dito, ang isang driver na nakasulat sa C ay magagamit upang tulungan ang mga tagatupad.
Habang ang kasalukuyang konsumo ay katamtaman sa saklaw ng mas mababa sa 20mA kapag aktibo, ang mga gumagamit ay dapat magkaroon ng kamalayan sa pinakamataas na supply boltahe ng 3V5. Ginagawa nito ang pagsasama ng sistema sa 5V I2C busses mahirap - isang antas na shifter na binubuo ng dalawang FETs ay isang workaround (tingnan directionalLevelShifterat application-note).
I-calibrate ako!
Karamihan sa mga sensor ay nangangailangan ng mga pagbabago sa disenyo ng kaso: walang isang ginupit na "upang tumingin mula sa", lahat ng uri ng mga kakaibang problema ay nagaganap. Pinapasimple ito ng ST sa pamamagitan ng nakalaang pagkakalibrate na gawain, na dapat patakbuhin sa bawat yunit sa pabrika. Ito rin ang naglalabas ng mga indibidwal na mga pagkakaiba sa optical sa "window", at mga account para sa anumang mga pagbabagong sanhi ng reflowing.
Ang isa pang magandang aspeto ay ang kakayahang itakda ang "rehiyon ng interes". Habang ang larangan ng view, sa pamamagitan ng default, ay lubos na malawak, ang optical array ay maaaring nakatutok upang limitahan ito. Sa isang pagkakatulad sa Kinect na nabanggit sa itaas, ang hanay ng pagtuklas ay tinukoy din sa "mga klase".
Ang tanging kawalan ng bahagi ay ang insanely small footprint. Ang ST ay gumagamit ng isang non-leaded case (Optical LGA) na kung saan ay ngunit 4.9 × 2.5 × 1.56 mm maliit: habang ang pakete ay maaaring reflowed na may kadalian, angkop ito sa isang prototype gamit ang isang paghihinang istasyon ay borderline imposible.
Tulad ng lahat ng bagong chips, ang availability ay isang isyu. Sa OEMsecrets, ang mga presyo ay mula sa 2.8 € hanggang 5 € sa mga maliliit na dami - gaya ng lagi, ang paghahambing sa presyo ay kaibigan ng iyong wallet. Tingnan sa ibaba!
Ang. Tam HANNA ... ay nagtrabaho sa naka-embed na espasyo mula noong oras na ang PIC 16F84A ay mainit. Matapos ang ilang taon ng mobile computing, ang kanyang pagkonsulta kumpanya Tamoggemon Holding k.s. ay refocused sa disenyo ng hardware.
Tingnan din: Ang ST ToF sensor ay umaabot sa saklaw ng detection sa FlightSense sa 4m